

经过验证的桥式起重机技术和应用
我们在现实条件下开发了这些桥式起重机技术,用于处理世界各地的桥式起重机操作人员每天碰到的操作难题。每种智能功能均适用于旧起重机和新起重机。
定位和负载控制技术确保桥式起重机操作人员安全、生产力和效率
我们的负载控制智能功能旨在通过使桥式起重机操作人员能够更方便地在桥式起重机上进行流畅而可控的走动,从而提高起重机操作人员的安全性和生产力。科尼提供以下负载控制智能功能:
防摇摆控制旨在通过控制大车和小车的加速度和减速度来自动限制负载摆动。该智能功能可帮助您精确定位负载并减少负载周期时间。
点动可确保在接近负载目的地时进行非常精确的增量运动。无论是起升,还是行走,均可激活该功能。缓动增量可预先设置,范围从 2 mm 到 100 mm 不等。
微速允许进行非常缓慢的移动以改进负载控制。该功能可用于所有运动,可将较大幅度的操纵杆移动转换成缓慢而精确的负载运动。
冲击负载保护可确保流畅地吊取负载。起重葫芦驱动器对负载实施监控。如果突然吊取负载,起升速度会自动下降,直到负载提升。这可防止对负载和起重机产生冲击,从而减少起重机钢结构和机械零件磨损。
绳索松弛预防在使用起吊装置(比如起吊梁)时具有的重要的安全和生产率功能。随着负载降低,起重葫芦驱动器检测到负载落地后便停止下降运动。起重葫芦绳索不松弛,绳索便不会滑出吊钩组,并且起吊装置不会倾覆。
同时使用两个吊钩提升负载时,起升同步可监管并控制两个吊钩,确保其以相同的速度运行(即使起重葫芦之间的负载不平衡)。
当负载小于最大额定负载时,扩展速度范围可确保提升和下降速度更快。可用的起升速度范围在额定标称速度基础上进行扩展。该智能功能可减少负载周期时间和等待时间。
先进的负载定位和区域控制确保最大生产力和效率
定位和区域控制功能可帮助桥式起重机操作人员更有效并且更精确地进行负载定位,以及根据生产线的物理布局调整桥式起重机的工作区。
目标定位最多允许 120 个预设目标位置和 8 个初始位置。操作人员选择负载的目标地址,并按下“target positioning”(目标定位)按钮。只要按下该按钮,桥式起重机便自动向选定的目标位置驱动。起重葫芦可以自动将负载提升至定义的行程高度。当负载到达目标位置时,起重葫芦自动将负载降至预定义的高度。
最终定位旨在加速负载至 X-Y 坐标的最终定位。这对于涉及静止机器或结构(操作人员必须在相同的位置重复放置负载)的工作循环尤其有用。操作人员最多可定义 16 个结束位置。将负载移至目标周围的定位窗口并按下“终端定位”按钮时,起重机便将负载移至该窗口的中心。然后,操作人员手动降下负载。
工作区域可以认为是桥式起重机自动停止时所在的临时虚拟墙。通过控制装置,起重机操作人员可对小车、大车或起重葫芦运动设置限制,从而在垂直方向或水平方向上创建一个虚拟墙。可以根据手头上的任务为起重机定义多个工作区域,从而保护临时走道或待装载滑车上的人员。
受限保护区域是禁区,桥式起重机操作人员不能超越控制或调节。最多可以定义 16 个矩形保护区,从而可以防止贵重生产设备或繁忙工作区可能出现的操作人员错误。
联系我们以了解哪种智能功能适用于您现有的起重机或新起重机。
Videos

Sway control
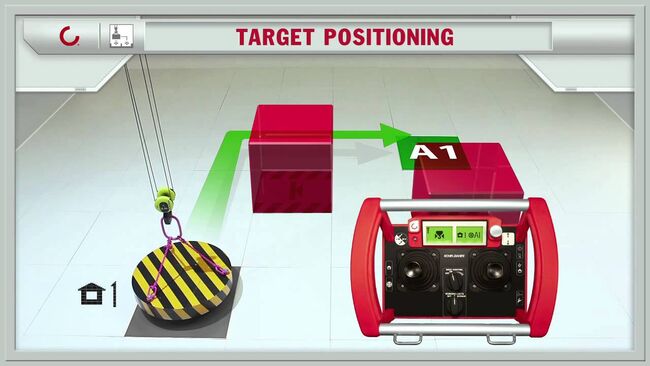
Target positioning